I first started reverse engineering the STM32 based programmable power supply as described in a prior blog post. The more I dug into Johan's code, the more impressed I became. There's a real gem stashed away in his project: the ocd-client.py utility. This is a work of genius!
Rather than play on my only DPS, I instead did some experimenting using the STM32_Smart V2 device, with a simple blink app installed.
I learned how to use OpenOCD with GDB with the UDemy class by Peter Dalmaris called Advanced Arduino Boards and Tools. Although this was an Arduino-specific class - the instructions are the same for the STM32 devices.
First, the OpenOCD server needs to be running (in this case with the Segger J-Link):
cd ~/workspace/opendps/openocd/scripts
sudo openocd -f interface/jlink.cfg -f target/stm32f1x.cfg
# or
sudo openocd -f interface/stlink-v2.cfg -f target/stm32f1x.cfgWith no other OpenOCD client connected (e.g. gdb not running!), we can inspect the GPIO Port C like this:
cd ~/workspace/opendps
./ocd-client.py gpioc
That command should return something like this:
GPIOC settings
CRL : 0x44444444 [0x40011000]
CRH : 0x44344444 [0x40011004]
IDR : 0x0000e000 [0x40011008]
ODR : 0x00002000 [0x4001100c]
BSRR : 0x00000000 [0x40011010]
BRR : 0x00000000 [0x40011014]
LCKR : 0x00000000 [0x40011018]
launch gdb. Note that a special one called "arm-none-eabi-gdb" is needed. I think gdb is really best with the "-tui" (text user interface) option turned on. Although not as cool as a full featured IDE such as Visual Studio, it is an impressive little text-based debugger.
cd ~/workspace/opendps/opendps
arm-none-eabi-gdb -d ./ -f opendps.elf -tui
then from the gdb prompt:
target remote localhost:3333
monitor reset init
If more source code is desired (beyond that in the app itself), in Ubunto go to "System settings - Software and Updates"
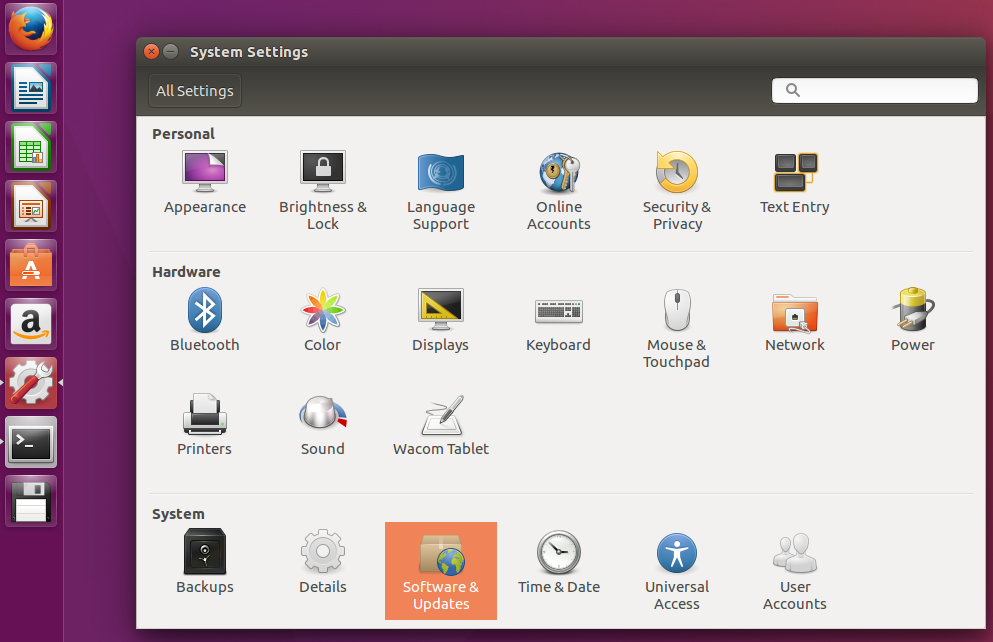
and be sure "source" is selected:

E: You must put some 'source' URIs in your sources.list
WITH that setting, then you can do things like:
sudo apt-get build-dep gcc
sudo apt-get build-dep libusb-1.0-0-dev
sudo apt-get build-dep gcc-arm-none-eabi
# this next command will typically install source code in your
# $USER\gcc-arm-none-eabi-4.9.3+svn231177
sudo apt-get source gcc-arm-none-eabi
then in gdb:
directory gcc-arm-none-eabi-4.9.3+svn231177/src/libgcc/config/arm
I used that include directory as "ctrl-c" would typically break in this file:
../../../../src/libgcc/config/arm/ieee754-df.S
MYLOG=~/toolchain.log
sudo apt-get update --assume-yes | tee -a $MYLOG
sudo apt-get install ssh --assume-yes
sudo apt-get install xrdp --assume-yes
sudo apt-get install samba samba-common-bin --assume-yes
sudo apt-get install fail2ban --assume-yes
sudo apt-get install binutils --assume-yes
sudo apt-get install gcc --assume-yes
sudo apt-get install gdb --assume-yes
sudo apt-get install make --assume-yes
sudo apt-get install build-essential --assume-yes
sudo apt-get install python --assume-yes
sudo apt-get install gawk --assume-yes
Additional resources and inspiration:



No comments:
Post a Comment
comments are disabled as nobody seemed to understand the no spam request.
See my latest blog at gojimmypi.github.io
Note: Only a member of this blog may post a comment.